
5 系统仿真
5.1 数学仿真
数学仿真结构图见图10,所取控制对象为时间常数为470ms的一阶环节。采样周期20ms时,Kp = 1, Ki = 0.023, Kd = 0.199时,得到如图11所示的动态响应曲线。

图10 数学仿真结构框图
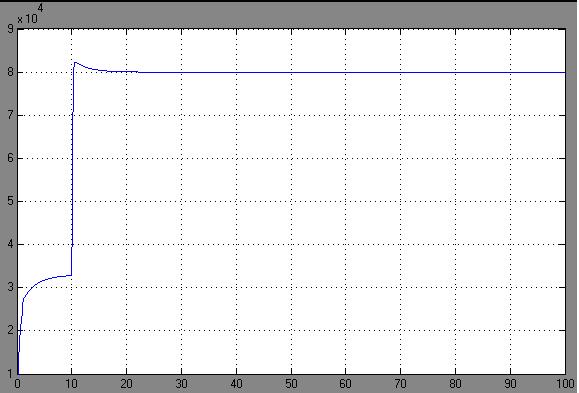
图11 数学仿真动态响应曲线
5.2 半实物仿真
半实物仿真硬件框图如图12所示,单片机输出的燃油泵PWM控制信号首先经过有源二阶滤波器,进行滤波后近似为脉动很小的直流电压信号,此信号对应于原系统的供油量。此信号加到一个RC构成的一阶环节上,此环节近似认为是涡喷发动机的实物模型,时间常数T设置为470ms。一阶对象的输出电压信号对应于涡喷发动机的转速信号,经过A/D采样后,根据此电压值的大小,可编程计数阵列的通道0(CEX0)工作在高速输出方式下(HSO)并产生相对应的速度方波信号。速度方波信号通过速度测量通道进行速度测量,并作为PID控制算法中的发动机实际转速。遥控速度指令脉冲通过波形发生器模拟产生。取Kp = 1, Ki = 0.023, Kd = 0.199时,速度指令从40000RPM变为80000RPM时,得到如图13所示的系统动态响应曲线。

图12 半实物仿真结构图
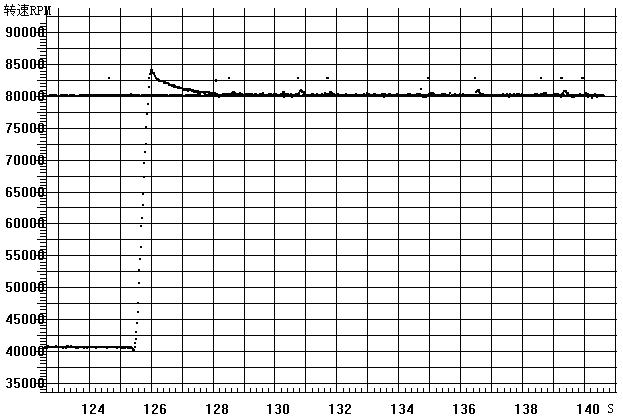
图13 半实物仿真动态响应曲线
6 与发动机联调
控制系统与发动机联机实验后,进行了点火和转速闭环控制。当速度指令控制杆从73500RPM推到83000RPM时,得到如图14所示的动态响应曲线。可见超调量比较小。
实验过程中,由于控制算法中用到的模型参数与实际发动机模型有一定出入,而且比例增益取值较小,积分环节在半实物仿真中经过验证,但在实际系统中尚未加入,这些因素导致稳态误差相对较大,需要进一步逼进模型和整定参数,以达到较好的动态稳态控制品质。
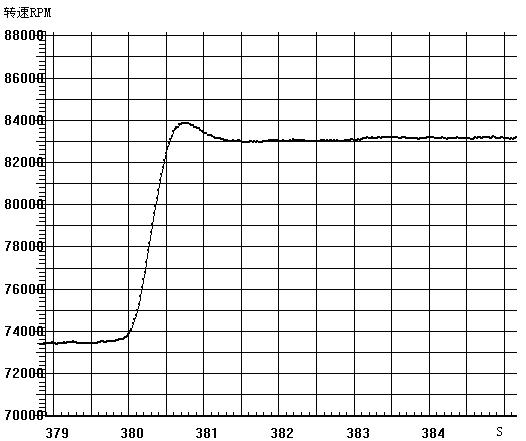
图14 动态响应曲线
7 结 论
涡喷发动机控制数字化是发动机性能提高的必然要求和发展趋势。该控制系统在这个发展潮流中做了积极深入的探索。计算机控制系统的进步和完善不仅需要硬件上稳定可靠,同时建立在对发动机模型的认识准确度基础上。要更准确的获取发动机的模型参数,则需要通过控制器的智能化,对发动机各种工况下的参数数据进行测量、记录,用系统辨识理论分析解算出模型参数,以调整控制参数更加合理,发动机性能更加可靠、高效和完善。
参考文献
1 管颜深等. 航空动力装置控制. 国防工业出版社,1985:4.
2 高金源等. 计算机控制系统. 北京航空航天大学出版社,2001:2.
3 王锦标等. 过程计算机控制. 清华大学出版社,1992:2.
4 徐爱钧等.单片机高级语言C51 Windows环境编程与应用. 电子工业出版社, 2001:7.
5 吴琪华. 航空发动机自动控制. 西北工业大学出版社,1985






