
本文介绍一种在 80C51 串行通讯应用中自动检测波特率的方法。按照经验,程序起动后所接收到的第1个字符用于测量波特率。
这种方法可以不用设定难于记忆的开关,还可以免去在有关应用中使用多种不同波特率的烦恼。人们可以设想:一种可靠地实现自动波特检测的方法是可能的,它无须严格限制可被确认的字符。问题是:在各种的条件下,如何可以在大量允许出现的字符中找出波特率的定时间隔。
显然,最快捷的方法是检测一个单独位时间(single bit time),以确定接收波特率应该是多少。可是,在 RS-232 模式下,许多 ASCII 字符并不能测量出一个单独位时间。对于大多数字符来说,只要波特率存在合理波动(这里的波特率是指标准波特率),从起始位到最后一位“可见”位的数据传输周期就会在一定范围内发生变化。此外,许多系统采用 8 位数据、无奇偶校验的格式传输 ASCII 字符。在这种格式里,普通 ASCII 字节不会有 MSB 设定,并且,UART总是先发送数据低位(LSB),后发送数据高位(MSB),我们总会看见数据的停止位。
在下面的波特率检测程序中,先等待串行通讯输入管脚的起始信号(下降沿),然后起动定时器T0。在其后的串行数据的每一个上升沿,将定时器 T0的数值捕获并保存。当定时器T0溢出时,其最后一次捕获的数值即为从串行数据起始位到最后一个上升沿(我们假设是停止位)过程所持续的时间。
CmpTable 表格列出了每一波特率的最大测量时间。这些数据是经过选择的,所以,4 个数据位时间(加上起始位时间)仍可产生正确的波特率。
使用这种方法时,必须遵守一个假设:这种技术仅取决于所接收到的一个字符,接收这个字符的波特率必须大于最低波特率。本质上来说,这意味着这个字符必须来自正常敲击键盘时所产生的字符。
在PC上,我们不可能快速、连续地敲击两个字符,以欺骗程序。但是,PC的功能键具有一个问题,因为它会连续发送两个紧挨着的字符,使程序检测得到错误的波特率。在为 12MHz时钟频率而设计的的例子程序中,其总采样时间大约为 65mS,大约可以在 RS-232 通讯中以300bps的速度发送两个字符。
假如使用了奇偶校验,当4 个MSB以及所接收字节的奇偶校验位均这同一值时,就可能会发生错误。这类错误的发生取决于系统是使用了奇校验或偶校验,可能发生于小写的字母“p”到“z”,还有花括号({})、垂直条(|)、波纹线(~),以及删除键“delete”。值得注意的是,惯常的提示符按键(如,空格键、回车键、及返回键),是没有这些限制的(奇数还是偶数的限制?)。
在以此方式运行程序时,如第一个字节已经过去,但串行口(UART)的波特率未能正确设置,那将造成用于检测波特率的第一个字符丢失。同样,如果在正常通讯中检测到串行口的通讯“帧”错误,绝大部分“实时”程序必须重复这一检测波特率的过程。
如需采用另外设定的晶体振荡频率、波特率,请使用下列公式计算 CmpTable的表项目:
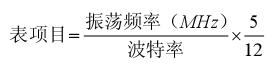
记住,表项目是两个字节的数值,所以上述公式的结果一定要分成高位字节及低位字节(如果采用十六进制,则容易得出高位、低位字节)。当然,也可以用汇编程序来完成所有的运算。
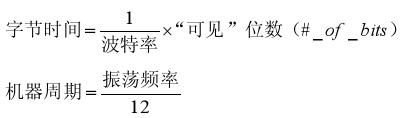
上述的公式是由以下得来的:


备注:在 8-N-1 格式的数据通讯中,‘#-of-bits’(“可见”位数)是 9,以及‘bits-to-recognize’(最小认可位数)是5。
- ;*****************************************************************************
- ;自动的波特率检测程序
- ;*****************************************************************************
- $ Title(Automatic Baud Rate Detection Test)
- $ Date(12–16–91)
- $ MOD552
- ;*****************************************************************************
- ; Definitions
- ;*****************************************************************************
- RX BIT P3.0 ;串行口的接收管脚
- CharH DATA 30h ;捕获定时器T0的高位字节
- CharL DATA 31h ;捕获定时器T0的低位字节
- BaudRate DATA 32h ;存贮最终确定的波特率
- Display EQU P4 ;显示结果的端口
- ;*****************************************************************************
- ; Reset and Interrupt Vectors
- ;*****************************************************************************
- ORG 8000h
- Start: ACALL AutoBaud ;检测波特率
- MOV Display, BaudRate ;显示波特率值
- SJMP Start
- ;*****************************************************************************
- ; Subroutines
- ;*****************************************************************************
- ;AutoBaud Rate Detect Routine.
- ;通过测量接收第一个字符所需要的时间来确定波特率。部分接收字符可能会发生错误,
- ;主要是那些以3(4?)位同样数值结束的字符。波特率指针(检测结果)保存在ACC中。
- ;*****************************************************************************
- AutoBaud: MOV TMOD, #01h ;初始化T0(串行口波特率定时器)
- MOV TH0, #0 ;将T0 置于16位定时器模式
- MOV TL0, #0
- MOV TCON, #0
- MOV CharH, #0 ;预置波特率检测结果
- MOV CharL, #0
- AB0: JB RX, AB0 ;等待串行通讯起始
- SETB TR0 ;起动定时器 T0
- AB1: JB TF0, AB3 ;检查定时器是否溢出?
- JNB RX, AB1 ;检测串行信号上升沿?
- MOV CharH, TH0 ;在串行信号上升沿捕获定时器T0数值
- MOV CharL, TL0
- AB2: JB TF0, AB3 ;检查定时器是否溢出?
- JB RX, AB2 ;检查串行信号下降沿?
- SJMP AB1 ;返回,继续采集
- AB3: CLR TR0 ;最大的采集时间已经超过,检查结果
- CLR TF0 ;清除定时器溢出标志
- MOV BaudRate, #19 ;设置波特率表指针
- CmpLoop: MOV A, BaudRate
- MOV DPTR, #CmpTable
- MOVC A, @A+DPTR ;取一个表项目(高位字节)以进行比较
- DEC BaudRate
- CJNE A, CharH, Cmp1 ;捕获值与表项目的高位字节相等?
- SJMP CmpLow ;高位字节相等,检查低位字节
- Cmp1: JC CmpMatch ;表项目小于定时值,则符合?
- DJNZ BaudRate, CmpLoop ;未至表项目的结尾,则继续?
- SJMP CmpMatch ;至比较结束
- CmpLow: MOV A, BaudRate
- MOVC A, @A+DPTR ;取一个表项目(低位字节)以进行比较
- CJNE A, CharL, Cmp2 ;捕获值与表项目的低位字节相等?
- SETB C ;结果相等
- Cmp2: JC CmpMatch ;如果表项目<定时值,则置位C
- DJNZ BaudRate, CmpLoop ;未至表项目的结尾,则继续?
- CmpMatch: MOV A, BaudRate ;数据比较完成
- CLR C ;产生结果(波特率索引)
- RRC A
- MOV BaudRate, A ;保存结果
- RET
- ;*****************************************************************************
- ; CmpTable 比较表
- ;*****************************************************************************
- ;比较表所保持的定时值用于公认的波特率转换情况。表项目为低位(LSB)、高位(MSB)。
- ;这些数据是以12MHz为基准操作。
- CmpTable: DB 40h,0 ;0 – 超出范围,值太低
- DB 80h,0 ;1 – 38400 baud.
- DB 0,01h ;2 – 19200 baud.
- DB 0,02h ;3 – 9600 baud.
- DB 0,04h ;4 – 4800 baud.
- DB 0,08h ;5 – 2400 baud.
- DB 0,10h ;6 – 1200 baud.
- DB 0,20h ;7 – 600 baud.
- DB 0,40h ;8 – 300 baud.
- DB 0,80h ;9 – 超出范围,值太高
- END
附: 波特率自动检测程序(通过验证)
- RX BIT P3.0 ;串行数据接收端
- CharH EQU 30H ;计时数据高位 TH0
- CharL EQU 31H ;计时数据低位 TL0
- BaudRt EQU 32H ;波特率计算值
- ;subroutine
- AutoBaud: MOV TMOD, #01H ;初始化“T0”为计时器
- MOV TH0, #0
- MOV TL0, #0
- MOV TCON, #0
- MOV CharH, #0
- MOV CharL, #0
- JB RX, $ ;等待通讯开始位
- SETB TR0
- CHK1: JBC TF0, CHK_END ;若溢出,则开始计算
- JNB RX, $-2 ;检测串行数据上升沿
- MOV CharH, TH0 ;捕获“T0”计时数
- MOV CharL, TL0
- JBC TF0, CHK_END ;若溢出,则开始计算
- JB RX, $-2 ;检测串行数据下降沿
- SJMP CHK1
- CHK_END: CLR TR0 ;停止计数器
- MOV DPTR, #baudtable
- MOV BaudRt, #19
- LOOP: MOV A, BaudRt ;
- MOVC A, @A+DPTR ;取表格数据(高位)
- DEC BaudRt ;索引地址减 1
- CJNE A, CharH, CMP_1 ;检查结果范围
- SJMP CMP_LOW
- CMP_1: JC MATCH ;若表中值 < 计时值,则匹配
- DJNZ BaudRt, LOOP
- SJMP MATCH ;表查完,至结束查表程序
- CMP_LOW: MOV A, BaudRt ;高位相等,比较低位
- MOVC A, @A+DPTR
- CJNE A, CharL, CMP_2
- SETB C ;相等则匹配
- CMP_2: JC MATCH ;若低位字节 < 计时值,则匹配
- DJNZ BaudRt, LOOP
- MATCH: MOV A, BaudRt ;转换为波特率索引值
- CLR C
- RRC A
- MOV BaudRt, A ;保存
- RET
- ;波特率索引表(LSB 在前,MSB 在后,晶振为11.0592MHz)
- baudtable: DB 03CH,00H ;0-越限,值太小
- DB 078H,00H ;1-波特率 38400
- DB 0F0H,00H ;2-波特率 19200
- DB 0E0H,01H ;3-波特率 9600
- DB 0C0H,03H ;4-波特率 4800
- DB 080H,07H ;5-波特率 2400
- DB 00H,00FH ;6-波特率 1200
- DB 00H,01EH ;7-波特率 600
- DB 00H,03CH ;8-波特率 300
- DB 00H,078H ;9-越限,值太大
- END






