
5 实际应用
5.1 异步电动机矢量控制系统
用TMS320F2812新型电机控制芯片设计的异步电动机矢量控制系统的基本结构如图5所示。
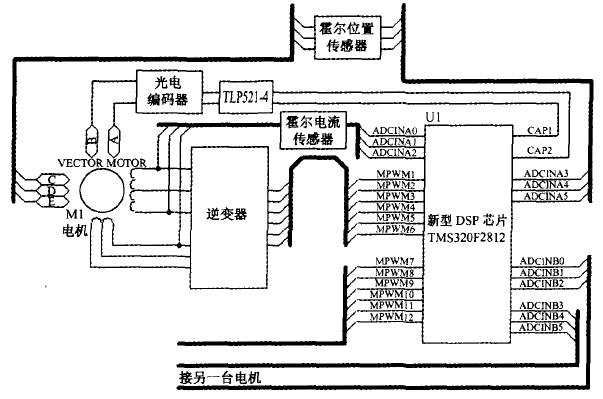
图5 应用于异步电机矢量控制系统
用可编程I/O口捕捉转子的速度反馈信号,电机的相电流反馈信号采集到ADC通道进行转换。接收光电编码器的信号,计算电机的转速。采集电机相电流的瞬时值,依此估计电机的实时运行状态,如转矩的大小和方向、电机的转速和滑差等。按照某种调控规律产生PWM信号,控制逆变器的开关动作,对电机运行状态进行调控。系统开发板采用长沙明伟电子公司的DSP2812开发板。板载资源如下:
DSP为TMS320F2812,32位定点高速数字信号处理器,最高工作频率150MHz,片内内置128K×16位FIAsH、18K×16位sRAM,片外扩展256K×16位sRAM、4M FIAsH,板上有RTL8019As以太网接口芯片,有RS232、RS485、CAN2.0转换电路,方便用户通讯。板上提供5路外扩可屏蔽中断源输入接口、2路外扩非屏蔽中断源输入接口、8路输入输出接口。
5.2 软件设计中部分程序代码
(1)初始化程序
- CLRC CNF ;B0
- SETC OVM
- SPM 0
- SETC SXM ;扩展符号
- LAR AR0,#DEC_MS
- LAR AR1,#(24-1) ;24个
- LACC #ANGLES_ ;指向源
- LARP AR0
- INIT_TBL
- TBLR * +,AR1 ;一个
- ADD #1 ;下一个地址
- BANZ INIT_TBL,AR0 ;AR1=0结束
- LAR AR4,#79H ;用于堆栈保存现场,B2(60H-80H)
- LDP #0E0H ;装载数据页指针
- SPLK #68H,WDCR ;不用看门狗
- SPLK #0284H,SCSR1 ;CLKIN 10M,CLKOUT 20MHz
- LDP #0E1H
- SPLK #0900H,ADCTRL1 ;ADC预分10,1MHz
- SPLK #0001H,MAXCONV ;两个通道
- SPLK #0010H,CHSELSEQ1 ;选择ADCIN0和ADCIN1
- LACC MCRA
- OR #0FD8H ;设置PWM,QEP
- SACI MCRA
- (2)电流采样和A/D转换子程序
- LDP #0E1H ;装载数据页指针
- SPLK #2000H,ADCTRL2 ;启动AD转换CONVERSION
- BIT ADCTRL2,3 ;将忙状态位复制到TC
- BCND CONVERSION,TC ;等待
- LACC RESULT0,10 ;左移后加载累加器
- LDP #0
- SACH IA ;高位左移并存储
- LDP #0E1H
- LACC RESULT1,10
- LDP #0
- SACH IB;高位左移并存储
6 结束语
基于TMS320F2812的异步电机矢量控制系统已研制成功,实践证明它具有优异的性能和良好的控制能力。目前应用的一些性能优越的电机控制技术,如矢量控制和直接力矩控制都属于计算密集型控制方法,采样周期短、算法复杂而且检测和计算精度高。它凭借优异的控制能力,可以胜任复杂精确的计算和控制,可以用于励磁脉冲控制系统、电力保护系统,也可延伸到不间断电源(UPS)、变频开关电源、机器人等高精度控制领域。






