
4 CS89712 гыC5510 DSP ЕФНгПкЩшМЦ
4.1 ЁЁгВМўСЌЯп
TMS320VC5510 гыCS89712 СЌНгЕФНгПкЕчТЗШчЭМ2 ЫљЪОЁЃгЩЭМ2 ПЩМћ,C5510 ЭЈЙ§EHPI гыжїЛњЩшБИЯрСЌЪБ,Г§СЫEHPI Ъ§ОнзмЯпМАПижЦаХКХЯпЭт,ВЛашвЊИНМгЦфЫќЕФТпМЕчТЗ,ЗЧГЃЗНБуЁЃ
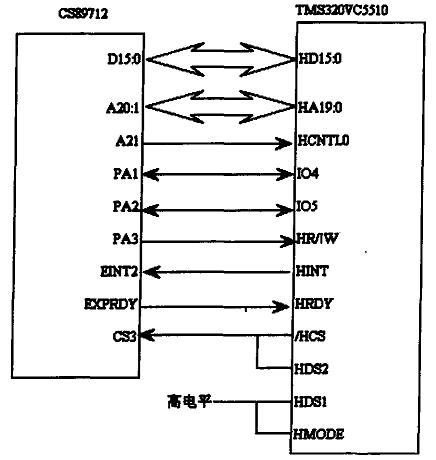
ЭМ2 ЁЁEHPIНгПкЗЧИДгУФЃЪНЯТЕФСЌНгЭМ
ДгEHPI МФДцЦїЕФБржЗЗНЪНПЩвдПДГі,НЋHPI16НгПкАВХХдкCS89712 ЕФBANK3(МДЕижЗЗЖЮЇ0X03000000ЁЋ0X03FFFFFF) ,ЖјЧвCS89712 ОпгаФкВПвыТыЦї,жБНгВњЩњЦЌбЁаХКХCS3ЁЃ
гЩгкC55X HPI16 ЪЧвЛИі16 ЮЛЕФВЂааЖЫПк,ЖјC5510 ЕФФкВПНсЙЙЮЊ16 ЮЛ,ЫљвддкЗЧИДгУФЃЪНЯТ,жЛашНЋЪ§ОнКЭЕижЗзмЯпЗжБ№СЌНгМДПЩЁЃСэЭт,ЛЙгаМИИіЙиМќЕФПижЦаХКХашвЊСЌНгЁЃвЛИіОЭЪЧHR/WаХКХ,гЩгкCS89712 УЛгаДЫаХКХ,ЪЙгУЖЫПкA ЕФPA3 РДДњЬцЁЃЕБPA3 = 1 ЪБ,ДњБэЖСВйзї,ЗДжЎЮЊаДВйзїЁЃгЩгкCS89712 КЭC5510 EHPI НгПкЕФПижЦТпМВЛОЁЯрЭЌ,ашвЊЪЙгУЦфЫќЕФвЛаЉаХКХЯпРДНјааФЃФт,ДЫЪБвЊбЯИёзёбEHPI ЕФЖСаДЪБађЁЃ
4.2 ШэМўЩшМЦ
дкгВМўСЌНгЩшМЦКУЕФЛљДЁЩЯ,ЮвУЧЛЙашвЊЭЈЙ§е§ШЗЕФБрГЬВХФмЪЕЯжЮвУЧдЄЯыЕФЪБађЁЃвђЮЊЮвУЧдкARM CS89712 ЩЯдЫааЧЖШыЪНВйзїЯЕЭГuCOS-II ,ЫљвддкаДГЬађЖдHPI НгПкНјааЖС/аДВйзїЪБНЋHPI НгПкПДзївЛИіЭтВПЩшБИ,НЋЭъГЩЖС/аДВйзїЕФГЬађПДГЩдкuCOS-II ЯТУцЕФвЛИізжЗћаЭЧ§ЖЏЁЃетбљШэМўЕФЩшМЦОЭБфГЩСЫдкuCOS-II ЯТУцЧ§ЖЏГЬађЕФПЊЗЂЁЃ
ПМТЧЕНCS89712 ВЛЙтвЊНЋDSP ЕФЪ§ОнШЁЙ§РД,ЖјЧвЛЙвЊНЋетаЉЪ§ОнДІРэКѓдйЗЂЫЭГіШЅ,етОЭашвЊетСНепжЎМфгаКмКУЕФХфКЯЁЃ
CS89712 гыDSP5510 жЎМфЕФEHPI НгПкЖС/аДГЬађжївЊгЩСНИіВПЗжзщГЩ: 1.ARM здЩэЕФГѕЪМЛЏ;2.HPI НгПкЖСаДГЬађЁЃ
4.2.1 ЁЁARM ДІРэЦїздЩэЕФГѕЪМЛЏ
ARMДІРэЦїЪзЯШвЊЭъГЩздЩэЙЄзїФЃЪНЕШвЛЯЕСаЕФГѕЪМЛЏ,ВХФме§ГЃНјааEHPI НгПкЕФЖС/аД,дДДњТыШчЯТЫљЪОЁЃ
- //ЮЊСЫХфКЯEHPI ПкЕФЪБађ,ЙиЕєMMU вГБэжаbank3 ЕФCache
- Xcount SETA 0x30000c1e
- ЁЁWHILE Xcount < 0x31000000
- DCD Xcount
- Xcount SETA Xcount + 0x00100000
- ЁЁWEND
- rMEMCFG1 &= 0x00ffffff ; //ЩшжУгыDSP СЌНгЕФnCS3 :16 ЮЛзмЯпПэЖШЁЂ8 ИіЫцЛњзДЬЌ
- rMEMCFG1 | = 0x01000000 ; //3 ИіЫГађЕШД§зДЬЌЁЂНћжЙЫГађЗУЮЪЁЂНћжЙРЉеЙЪБжгЩЯУцетЖЮДњТыжївЊЪЧЖдМИИіМФДцЦїНјааХфжУЁЃ
дкХфжУКУARM ДІРэЦїЕФЙЄзїФЃЪНКѓ,ЖдЭтВПI/O НгПкBANK3 ЕФЖдгІЕижЗНјааЖС/аДВйзї,ОЭПЩвдЭъГЩЖдHPI НгПкЕФЯргІВйзїСЫЁЃ
4.2.2 ЁЁHPI НгПкЖСаДГЬађ
вдЯТЕФЕквЛОфДњТыЪЧКъЖЈвх,ЖЈвхСЫC5510 ЕФEHPI НгПкМФДцЦїЕФЕижЗЁЃдкБОЩшМЦжа,вбОНЋHPIПкгыЭтВПI/O НгПкЕФBANK3 ЯрНг,етбљHPI ПкНЋеМгУЭтВПI/O НгПкBANK3 ЕФЕижЗЁЃгЩгкЪЧЪЙгУPA3РДФЃФтHPI16 НгПкЕФHR/W,ЫљвдЖдDSP НјааЖС/аДВйзїЪБ, гІЯШНЋИУаХКХжУЮЊЯргІЕФЖС/аДгааЇзДЬЌЁЃ
- //ARMЯђDSP аДЪ§ОнЪБ
- #define EHPI-BASE 0x3208000
- int t;
- rPADDR = 0x08 ; //PA3 ЗНЯђЖЈвхЮЊЪфГі
- rPADR = 0x00 ; //PA3 ЮЊЕЭЕчЦН
- t = *(volatile U16 *) ( EHPI-BASE + Add-offset) ;
- //ARMДгDSP ЖСШЁЪ§ОнЪБ
- rPADDR = 0x08 ; //PA3 ЗНЯђЖЈвхЮЊЪфГі
- rPADR = 0x08 ; //PA3 ЮЊИпЕчЦН
- (volatile U16 *) ( EHPI-BASE + Add-offset) = t
5 НсЪјгя
вдARMаОЦЌзїЮЊжїПижЦЦї,гУDSP аОЦЌНјаадЫЫу,ШЛКѓЭЈЙ§HPI НгПкНјааЭЈаХКЭНЛЛЛЪ§ОнЕФЧЖШыЪНЯЕЭГЩшМЦгІгУФЃЪНЕФЕУЕНдНРДдНЙуЗКЕФгІгУ,ЖјетСНепжЎМфФмЙЛИпаЇЁЂПьЫйВЂЧвЮШЖЈЕФНјааЪ§ОнНЛЛЛНЋЪЧгАЯьЯЕЭГадФмЕФЙиМќВПЗжжЎвЛЁЃЮФжаИјГіЕФCS89712 КЭC5510 жЎМфЕФгВМўСЌНгЗНЗЈКЭШэМўЩшМЦОЙ§ЪЕМљЕФбщжЄ,ЪЧПЩааЕФКЭТњзувЊЧѓЕФЁЃ






