
2.2.4ҪУКЬКэҫЭБчіМ
ПВГжОТГЗМЦВЫИзәОҪУКЬКэҫЭЈ¬Н¬СщПИёшіцКұРтНјИзНј6Ј¬ФЩҪвКНБчіМЎЈ
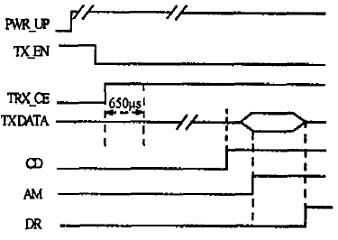
ўЩЦчMCUҪ«TX_ENЦГёЯЎўTRX_CEЦГөНЈ¬№э650 usәуЈ¬ФтҪшИлҪУКЬДЈКҪЎЈ
ўЪnRF905јаҝШЖөөАК№УГЧҙҝцЈ¬Из№ы·ўПЦЖөөАұ»ХјУГЈ¬ФтҪ«CDЦГёЯЈ¬ҝЙТФАыУГёГМШРФІЙИЎТ»Р©іеН»ұЬГвјмІв»ъЦЖЈ¬·ўЛНКэҫЭЗ°Из№ыјмІвөҪCDРЕәЕЈ¬ФтҝЙТФЛж»ъСУіЩТ»¶ОКұјдФЩ·ўЛНКэҫЭЈ¬ёГМШРФҝЙТФУРР§өШұЬГвКэҫЭіеН»ЎЈ
ўЫөұҪУКХөҪөДКэҫЭ·ўЛНөШЦ·әНЧФјәөШЦ·ЖҘЕдКұЈ¬ФтAMЦГёЯЈ¬НЁЦӘёГКэҫЭКЗ·ўёшЧФјәөДЎЈ
ўЬ¶ФКэҫЭөДCRCҪшРРРЈСйЈ¬Из№ыХэИ·Ј¬ФтИҘіэ°ьН·әНCRC¶ОЈ¬Ҫ«КэҫЭұЈҙжФЪҪУКЬКэҫЭјДҙжЖчRX_PAYLOADЈ¬Н¬КұDRРЕәЕЦГёЯЈ¬НЁЦӘЦчMCU¶БИЎКэҫЭЎЈ
ўЭЦчMCUҪ«TRX_CEЦГөНЈ¬ҪшИлstandby(КЎөз)ДЈКҪФЩНЁ№эSPIҝЪҪ«КэҫЭ¶БіцАҙЈ¬өұКэҫЭ¶ј¶БНкәуЈ¬nRF905Ҫ«AMәНDRЦШРВЦГөНЈ¬ОӘПВҙОҪУКЬКэҫЭЧцЧјұёЎЈ
ҪУКЬКэҫЭБчіМНјИзНј7ЛщКҫЎЈ
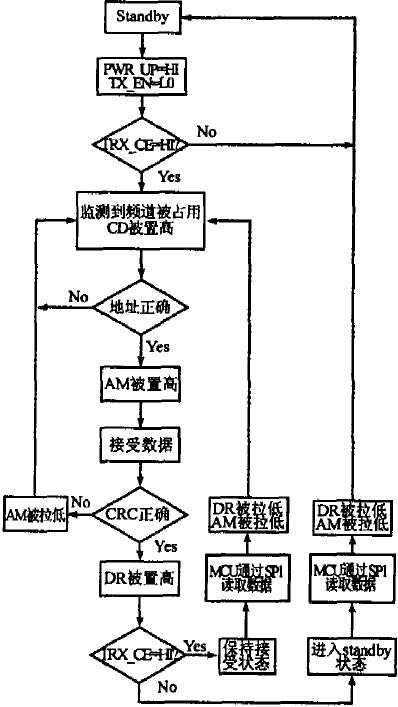
Нј7ҪУКЬКэҫЭБчіМНј
Из№ыРиТӘҪ«Зэ¶ҜТЖЦІөҪЖдЛьЖҪМЁИзARMЙПЈ¬Ц»ТӘҪ«ҪУҝЪЦШРВ¶ЁТеЈ¬SPI¶БРҙәҜКэЧцПаУҰөДөчХыЈ¬ТЖЦІЖрАҙ·ЗіЈјтөҘЎЈ
3 MACЛг·ЁКөПЦ
јИИ»nRF9O5МṩБЛХвГҙ¶аЖөөАәНМшЖө»ъЦЖЈ¬ИзәОід·ЦАыУГХвР©МШРФЈ¬К№НЁС¶ёьјУОИ¶ЁДШ?ПВГжКөПЦөДКЗ»щУЪAd HocНшВзөДMACРӯТйЎЈ
3.1 MACРӯТйҝтјЬ
ИзНј8ЛщКҫЈ¬ЖөөАұ»·ЦіЙБҪАаЈ¬ҝШЦЖЖөөАәНКэҫЭЖөөАЎЈ¶шКэҫЭЖөөАУЦұ»·ЦіЙИфёЙЧйЈ¬ГҝЧйҫщУРТ»ёцЦчКэҫЭЖөөАәНБҪёцұёУГКэҫЭЖөөАЎЈХэіЈНЁС¶өДКұәтЈ¬ІЙУГЦчКэҫЭЖөөАЈ¬Из№ыОуВлВКёЯҙпТ»¶ЁіМ¶ИЈ¬ҝЙТФМшЦБұёУГКэҫЭЖөөАјМРшНЁС¶ЎЈ
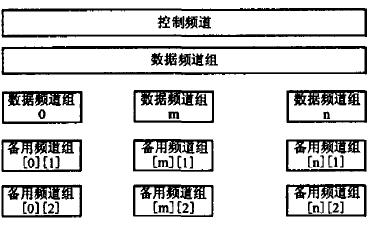
Нј8 РӯТйјЬ№№
НЁіЈЈ¬ёчҪЪөгФЪҝШЦЖЖөөАҙҰУЪҪУКЬЧҙМ¬Ј¬ІЙУГ№гІҘөШЦ·ЎЈAd HocНшВзЦРёчҪЪөгҫщТФЧФјәОӘЦРРДЈ¬№КёчҪЪөгҫщО¬»ӨЧЕЧФјәөД“ҝШЦЖЖөөАЧҙМ¬ұн”BroadStatusәН“ЖөөАБРұн”HoplistЈ¬БҪХЯ·ЦұрјЗВјБЛҝШЦЖЖөөАәНКэҫЭЖөөАөДК№УГЧҙҝцЎЈҪб№№·ЦұрИзПВЛщКҫЈә
struct
{
ҝШЦЖЖөөАК№УГұкЦҫbroad;
ҝШЦЖЖөөАК№УГКұјдbroadtime;
}BroadStatus;
struct
{
ЖөөАБРұнhoplist;
ЖөөАК№УГКұјдhoptime[n];
ЖөөАХјУГөШЦ·hopaddress[n][2];
}Hoplist
3.2 ҝШЦЖЖөөА
ҝШЦЖЖөөАУГУЪёчҪЪөгҪ»»»В·УЙРЕПўЎўОХКЦРЕПўөИЎЈУЙУЪОХКЦРЕПўәНВ·УЙРЕПўПа¶ФҙуҝйөДКэҫЭРЕПў¶шСФәЬРЎЈ¬ЛщТФёчҪЪөгХјУГҝШЦЖЖөөАөДКұјдПа¶ФҪПЙЩЈ¬ХвФЪәЬҙуіМ¶ИЙПұЬГвБЛҝШЦЖЖөөАЙПөДКэҫЭіеН»ЎЈө«КЗУЙУЪҝШЦЖЖөөАОӘЛщУРҪЪөгЛщ№ІУГЈ¬ұШРлІЙУГіеН»ұЬГвРӯТйЈ¬ұҫОДІЙУГБЛIEE802.11bөДCSMA/CA»ъЦЖЈ¬јҙГҝҙО·ўЛНКэҫЭ¶јТӘөИөҪЖөөАҝХПРЈ¬ФЩУГ“¶юҪшЦЖЦёКэНЛұЬЛг·Ё Лж»ъСУКұТ»¶ОКұјдЈ¬өұСУКұКұјдөҪФЩ·ўЛНКэҫЭЈ¬ХвСщҫНУРР§өШұЬГвБЛН¬ЖөөАПВөДКэҫЭіеН»ЎЈН¬КұҝјВЗөҪТюІШҪЪөгЎўұ©В¶ҪЪөгөИОКМвЈ¬ОТГЗІЙУГБЛRTS/CTS/BROAD»ъЦЖЈ¬Из№ыҪЪөгAРиТӘ
·ўЛНКэҫЭөҪҪЪөгBЈ¬ФтПИ·ўЛНRTSІўРҜҙшЧФјәөДКэҫЭЖөөАБРұнРЕПўЈ¬ҪЪөгBКХөҪRTSә󣬶ФұИЧФјәөДЖөөАБРұнСЎФсТ»ёц№ІУГөДҝХПРЖөөА·ө»ШRTSЈ¬ІўМшИЛёГЖөөАөИҙэКэҫЭөДөҪАҙЎЈҪЪөгAКХөҪCTSәуФЩРҜҙшК№УГЖөөАРЕПў·ўЛНBROADЈ¬И»әуМшИлКэҫЭЖөөАҝӘКјУлҪЪөгBҪшРРКэҫЭНЁС¶ЎЈ¶шЖдЛыҪЪөгКХөҪCTSЎўBROADәуј°КұөЗјЗЖөөАБРұнРЕПўЈ¬·ҪұгПВҙОКэҫЭҙ«КдКұЦұҪУІйСҜЈ¬ёГРЕПў»бЛжЧЕПөНіҫ§ХсІ»¶ПёьРВЈ¬ХвСщёчҪЪөгЛщО¬»ӨөДЖөөА¶јКЗөұЗ°ЖөөАК№УГөДЧҙҝцЎЈ
3.3 КэҫЭЖөөА
Ул№ІУГөДҝШЦЖЖөөАІ»Н¬Ј¬өұЛ«·ҪҪЪөг¶јҙҰУЪКэҫЭЖөөАКұПаөұУЪҪЁБўБЛЧЁУГНЁөАЈ¬ҙЛКұІ»УГІЙИЎCSMA/CA»ъЦЖЈ¬ОТГЗІЙУГИ·ИП»ъЦЖЎўЦШ·ў»ъЦЖәНМшЖө»ъЦЖАҙИ·ұЈКэҫЭЧјИ·ОЮОуөДҙ«КдЎЈНЁС¶БчіМ»щұҫІЙУГDATA+ACKРОКҪЈ¬јҙ·ўЛННкDATAөИҙэACKЈ¬ҪУКЬөҪDATAФт·ўЛНACKИ·ИПЎЈИз№ы
ACKІ»ХэИ·»тГ»КХөҪACKФтЦШ·ўЈ¬Из№ыёГЖөөАІ»ДЬК№УГФтҪшРРМшЖөЎЈМшЖөРиТӘЛ«·ҪРӯөчҪшРРЈ¬ҫЯУРТ»¶ЁөДёҙФУРФЈ¬ХвАпҫЯМеҪвКНТ»ПВМшЖө»ъЦЖЎЈ
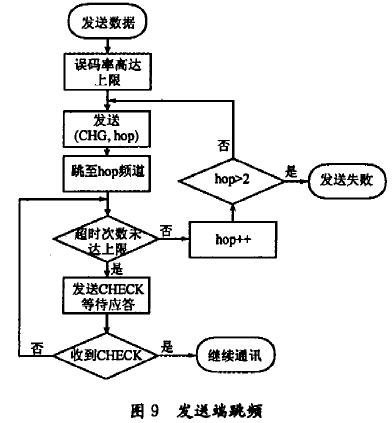
Нј9ОӘ·ўЛН¶ЛМшЖөКҫТвНјЈ¬өұ·ўЛН¶ЛКЬёЙИЕЈ¬јҙ·ўЛН¶ЛҝЙТФ·ўЛНКэҫЭЈ¬ө«ҪУКЬІ»өҪКэҫЭЈ¬өұОуВлВКёЯҙпЙППЮКұЈ¬·ўЛН¶Л·ўЛНCHGІўРҜҙшҪ«МшЦБөДЖөөАЦөhopЈ¬И»әуМшИЛұёУГКэҫЭЖөөАhopЦРЈ¬ФЩ·ўЛНCHECKЈ¬өИҙэОХКЦРЕПўЎЈ¶шҪУКЬ¶ЛКХөҪCHGәуЈ¬ҙУЦРМбИЎіцhopРЕПўЈ¬ФЩМшЦБёГhopЈ¬өұҪУКЬөҪCHECKКұЈ¬ФЩ·ўЛНСйЦӨРЕПўCHECKЎЈЧФҙЛЈ¬КХ·ўЛ«·ҪОХКЦНкұПЈ¬ҪУЧЕФЪРВөДЖөөАЦРјМРшНЁС¶ЎЈ
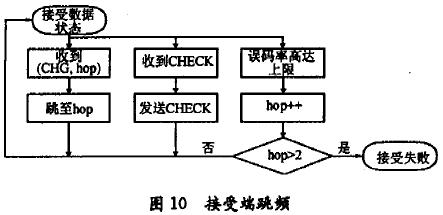
Нј10ОӘҪУКЬ¶ЛМшЖөКҫТвНјЈ¬өұҪУКЬ¶ЛКЬёЙИЕ»тХЯКХ·ўЛ«·Ҫ¶јКХөҪёЙИЕЈ¬ХвКұҪУКЬ¶ЛКХІ»өҪАҙЧФ·ўЛН·ҪөДҝШЦЖРЕПўCHGЈ¬Ц»ДЬНкИ«ТАҝҝОуВлВКРЕПўЈ¬ҙЛКұН¬ІҪУИОӘЦШТӘЎЈУЙУЪЛ«·ҪОуВлВКН¬КұФцјУЈ¬өұТАҙОҙпөҪЙППЮКұЈ¬ҝЙТФТАҙОМшИЛұёУГЖөөАјМРшНЁС¶ЎЈУЙУЪҙжФЪЦШ·ўәНСУКұ»ъЦЖЈ¬Л«·ҪІўІ»РиТӘН¬КұМшИлұёУГЖөөАЈ¬ПөНіҫЯУРТ»¶ЁөДИЭҙнРФЎЈГҝёцКэҫЭЖөөАЧйУРБҪёцұёУГЖөөАЈ¬Из№ыИэёцЖөөА¶јІ»ДЬК№УГЈ¬ФтҙЛҙОНЁС¶ҫНК§°ЬБЛЎЈө«КЗНЁіЈТ»¶ЁКұјдДЪёЙИЕЦ»ФЪДіёцЖө¶ОҙжФЪЈ¬Ц»ТӘҪ«ИэёцКэҫЭЖөөААӯҝӘТ»¶ОЖөҫаЈ¬јҙҝЙУРР§өШөЦЦЖёЙИЕЎЈ
4 ЧЬҪб
ОДЦРОЮПЯ¶аөгКХ·ўДЈҝйФЪMSP430әНnRF905өД»щҙЎЙПЈ¬КөПЦБЛОпАнІгЗэ¶ҜәН»щУЪAd HocНшВзөДMACІгРӯТйЈ¬ө«Г»УРМṩНшВзІгВ·УЙРӯТйЎЈОпАнІгөг¶ФөгНЁС¶И·ұЈБЛКэҫЭҙ«КдөДҝЙҝҝРФЎЈMACРӯТйИ·ұЈН¬Кұҙ«КдКэҫЭКұұЬГвіеН»ЎЈФЪІвКФЦРЈ¬ОТГЗНшВзІгІЙУГУгСЫЛг·ЁЈ¬УГ15ёцҪЪөг¶ҜМ¬ЧйНшІў»Ҙҙ«РЕПўЈ¬ФЪёГМеЦЖПВРЕПўҝЙТФН¬Кұ·ўЛНПа»ҘЦ®јдГ»УРёЙИЕЎЈёГДЈҝйҝЙТФәЬәГөДФЛУГФЪТ»Р©іӯұнПөНіЎўТЈҝШПөНіЎўТФј°»ъЖчИЛҝШЦЖЦРЎЈ






